
Automatic control
Overview
In general, the job of the control system is to turn high level instructions from the software system, and turn them into instructions for the hardware. This is done by having a positions in 3d space (x, y z), a final gripper angle (respective to the ground), controls for the rotation, controls for opening and closing the gripper, and a deltaTime as an input, and turning those into control signals for the motors:
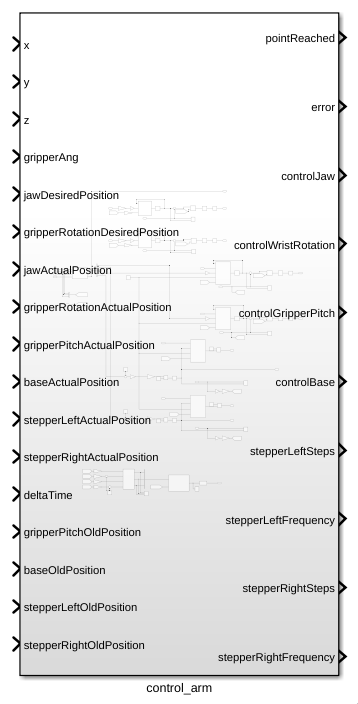
The control system also has feedback from the motors with variables with a name ending with ActualPosition, and the old positions of the motors, representing the position of the motors before the movement starts.