
Overview
Communication is a subsystem that allows other subsystem to exchange messages and perform various actions needed for the ERC tasks. Consider the Rover Architecture diagram defined in this page:
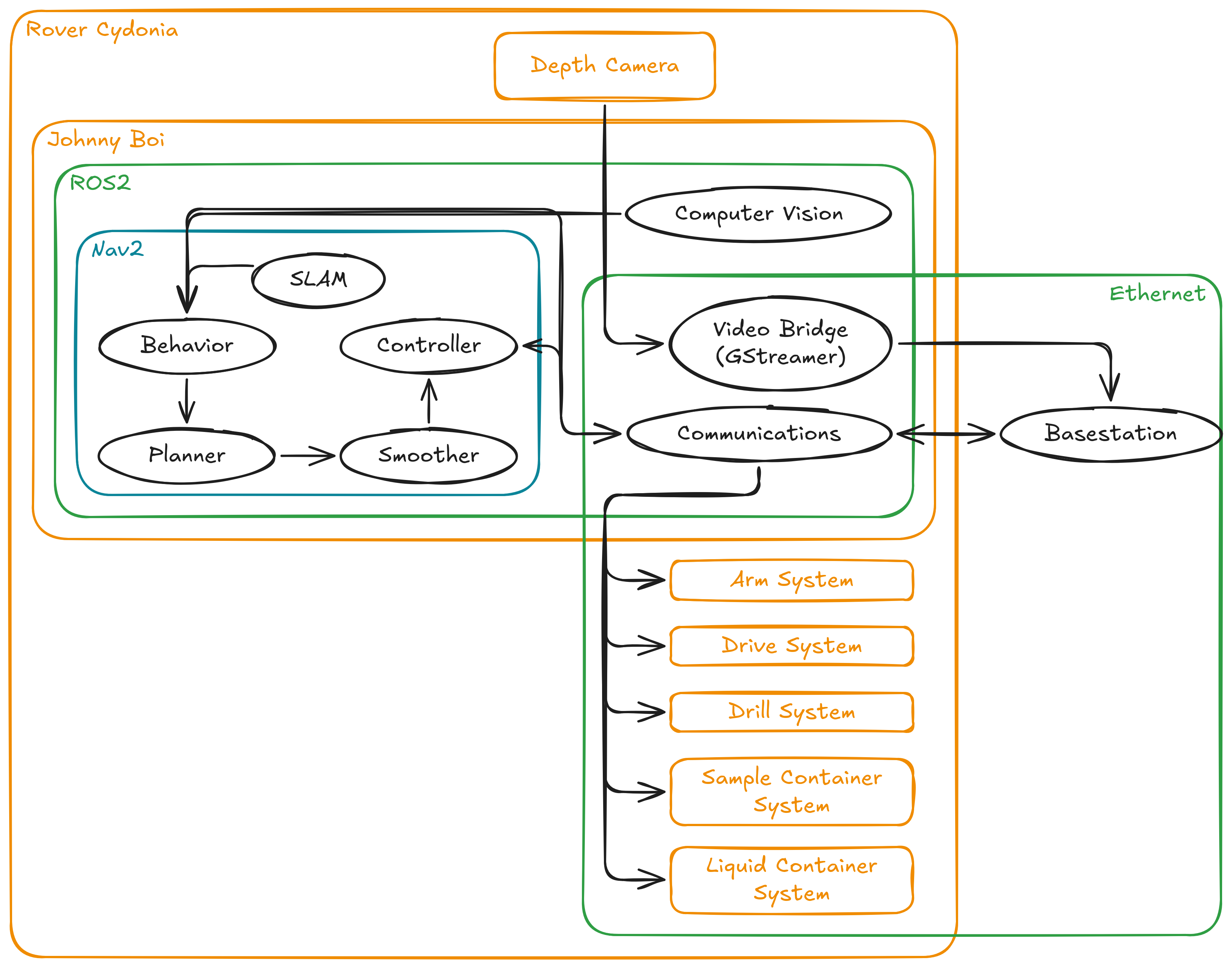
Rover Architecture
The Communications node is center to all important subsystems. It bridges the two different types of networks present on the rover: the Ethernet Network and the ROS2 Network. Through its use, Jonny Boi (the Jetson) can communicate with the Basestation or with the Microcontrollers over the bridged network.
Messages are typically sent as protobuffers