
Overview
Communication is a subsystem that allows other subsystem to exchange messages and perform various actions needed for the ERC tasks. Consider the Rover Architecture diagram defined in this page:
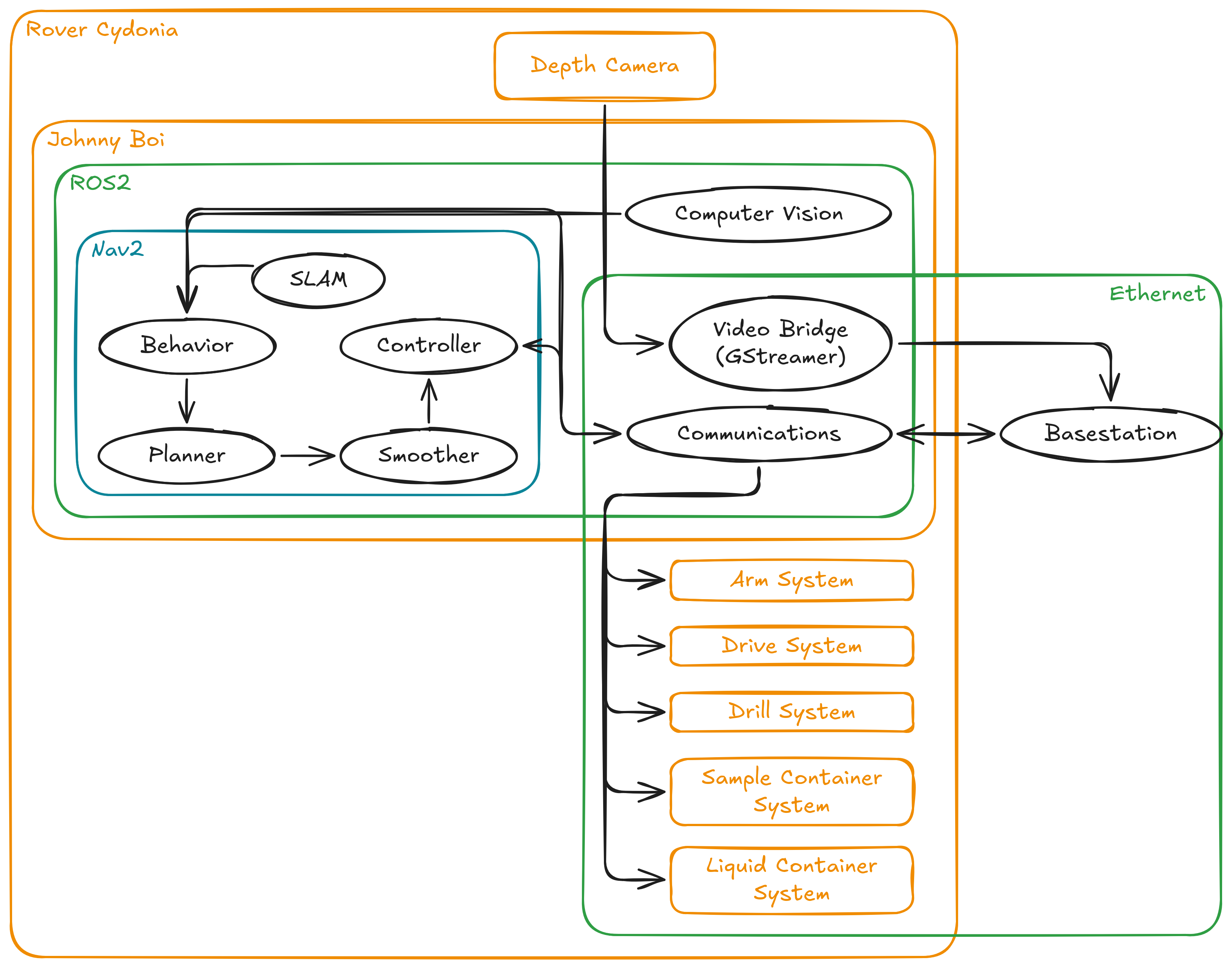
Rover Architecture
The Communications node is center to all important subsystems. It bridges the two different types of networks present on the rover: the Ethernet Network and the ROS2 Network. Through its use, Jonny Boi (the Jetson) can communicate with the Basestation or with the Microcontrollers over the bridged network.