
Automatic control
Overview
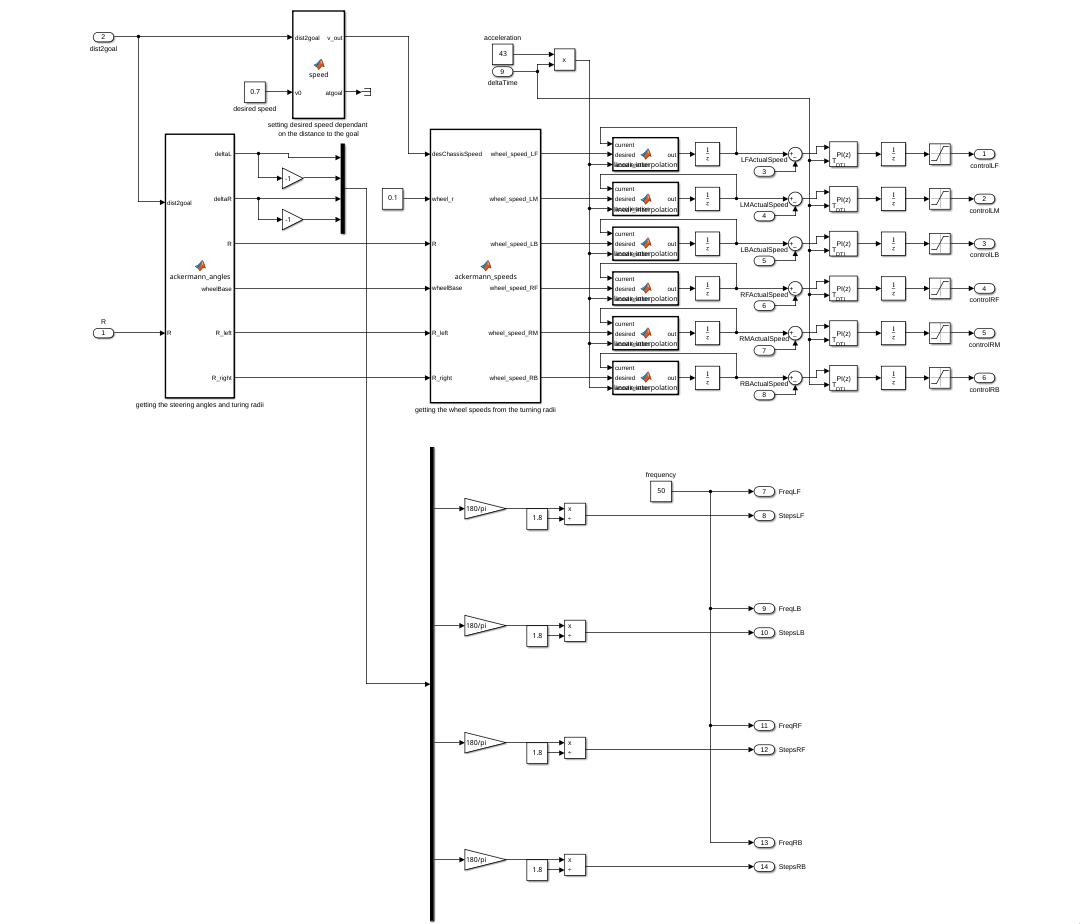
In general, the job of the control system is to turn high level instructions from the software system, and turn them into instructions for the hardware. This is done by having a distance to a goal, a turning radius, and a deltaTime as an input, and turning those into control signals for the motors:
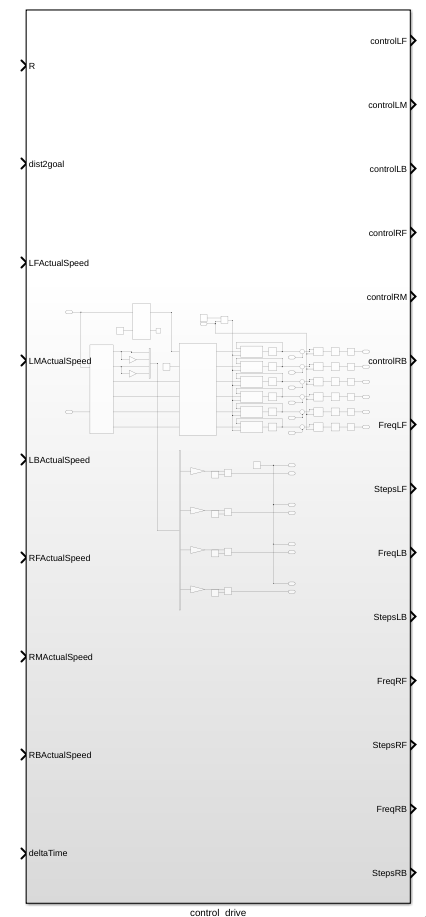
This is done in several steps.
Determining current desired speed
To determine what speed the rover should move at this moment, the distance to the goal is used to decide how fast the rover should move, which in general means, closer to the goal = move slower, and if we are really close, stop moving completely. If the rover is not close to the goal, it will try to move at v0 speed.
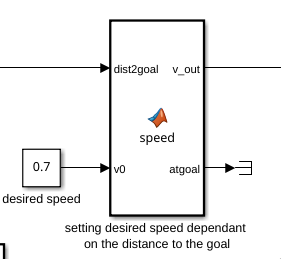
The function simply works like this:
function [v_out, atgoal] = speed(dist2goal, v0)
%slow down if close to goal
if dist2goal <= 1
v_out = 0;
atgoal = 1;
%stopping if the rover is close to the target
elseif dist2goal <= 2
v_out = v0 * 0.5;
atgoal = 0;
%keeping cruising speed if not close to goal
else
v_out = v0;
atgoal = 0;
end
Ackermann steering
Getting the necessary angles that the steering motors need to make is done by calculating the Ackermann steering angles that equate from the given turning radius and distance to the goal.
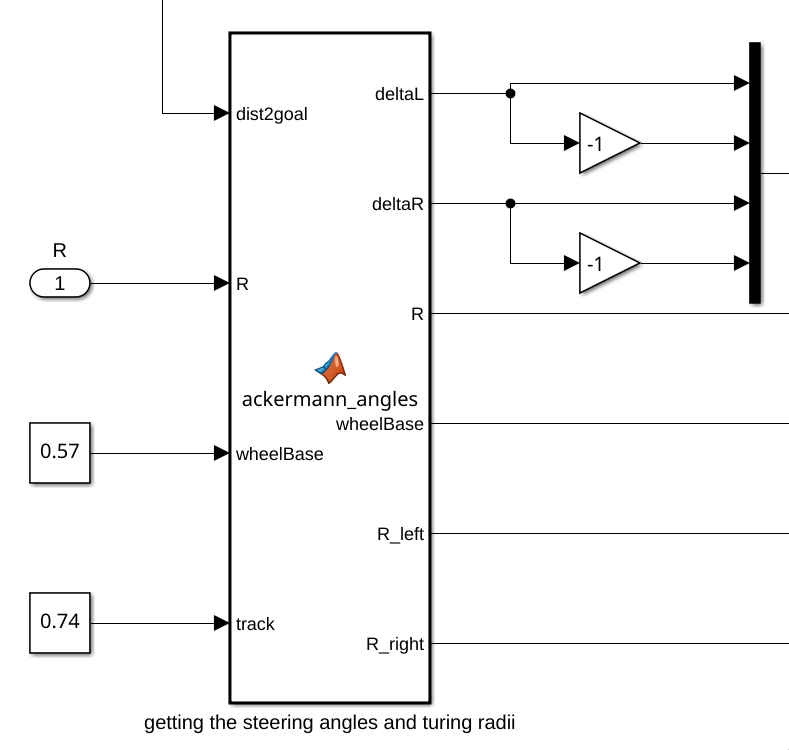
deltaL and deltaR are equal to the angles that the left and right steering motors need to make, which are sent to the steering control.
This function also outputs the turning radius of the right and left wheels of the rover.
The function works like this:
function [deltaL,deltaR,R,wheelBase,R_left,R_right] = ackermann_angles(dist2goal,R,wheelBase,track)
% Function to compute ackerman steering angles from a bicycle steer angle.
if R == 0
alpha = 0;
else
alpha = dist2goal/R;
end
R = abs(R);
if alpha < 0
R_left = (R+track/2);
R_right = (R-track/2);
deltaL = atan(wheelBase/(R_left));
deltaR = atan(wheelBase/(R_right));
elseif alpha > 0
R_left = (R-track/2);
R_right = (R+track/2);
deltaL = -atan(wheelBase/(R_left));
deltaR = -atan(wheelBase/(R_right));
else
deltaL = 0;
deltaR = 0;
R_left = R;
R_right = R;
end
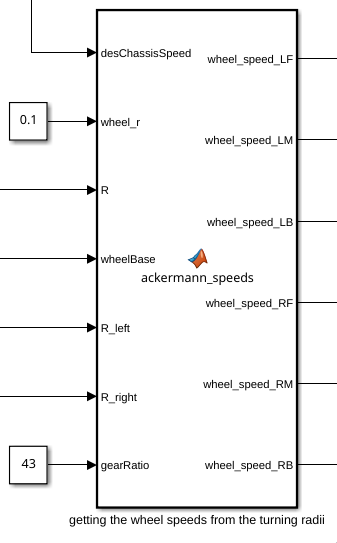
endAckermann speeds
Using the data coming from the previous function, as well as a wheel radius and motor gear ratio, the speeds needed by the motors are calculated.
Internally the function works like this:
function [wheel_speed_LF,wheel_speed_LM,wheel_speed_LB,wheel_speed_RF,wheel_speed_RM,wheel_speed_RB] = ...
ackermann_speeds(desChassisSpeed,wheel_r,R,wheelBase,R_left,R_right,gearRatio)
if R > 0
wheel_speed_LF = (desChassisSpeed/wheel_r)*sqrt(R_left^2 + (wheelBase/2)^2)/R;
wheel_speed_LM = desChassisSpeed * R_left/(R*wheel_r);
wheel_speed_LB = (desChassisSpeed/wheel_r)*sqrt(R_left^2 + (wheelBase/2)^2)/R;
wheel_speed_RF = (desChassisSpeed/wheel_r)*sqrt(R_right^2 + (wheelBase/2)^2)/R;
wheel_speed_RM = desChassisSpeed * R_right/(R*wheel_r);
wheel_speed_RB = (desChassisSpeed/wheel_r)*sqrt(R_right^2 + (wheelBase/2)^2)/R;
else
wheel_speed_LF = desChassisSpeed / wheel_r;
wheel_speed_LM = desChassisSpeed / wheel_r;
wheel_speed_LB = desChassisSpeed / wheel_r;
wheel_speed_RF = desChassisSpeed / wheel_r;
wheel_speed_RM = desChassisSpeed / wheel_r;
wheel_speed_RB = desChassisSpeed / wheel_r;
end
wheel_speed_LF = wheel_speed_LF * gearRatio;
wheel_speed_LM = wheel_speed_LM * gearRatio;
wheel_speed_LB = wheel_speed_LB * gearRatio;
wheel_speed_RF = wheel_speed_RF * gearRatio;
wheel_speed_RM = wheel_speed_RM * gearRatio;
wheel_speed_RB = wheel_speed_RB * gearRatio;
endControl signals
After getting all the angles and speeds needed for the rover to make a certain movement, the signals get sent to the motor drivers/controllers in a way that they can use them.