Graph subject to change as communication gets finalized
[](https://bookstack.roboteamtwente.nl/uploads/images/gallery/2026-04/scaled-1680-/basestationcoms.png) # service.rs — UDP Socket `UdpService` is a thin wrapper that binds a UDP socket and holds it in an `Arc`socket2` allows to customize the socket, otherwise the buffer size will be set by the system and be too small
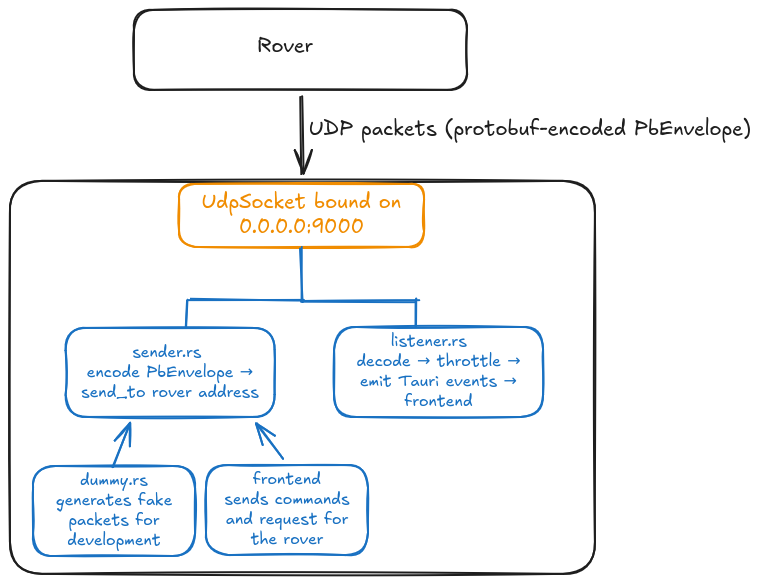
# listener.rs — Incoming Packet Handler `run_listener()` is the main receive loop. It runs for the lifetime of the app as a spawned async task. On every received UDP datagram it: 1. Decodes the raw bytes as a `PbEnvelope` using prost 2. Extracts the inner payload variant 3. Checks a per-payload **throttle** — events are forwarded to the frontend at most once every **100ms** per payload type, regardless of how fast the rover sends 4. Emits a Tauri event to the frontend with the decoded message as the payload ### Throttling Each payload type has its own independent `Throttle` instance. This prevents high-frequency streams (e.g. IMU at 50Hz) from flooding the frontend with more updates than it can usefully render. ### Tauri events emitted These are the event names the frontend can listen to with `listen()`:**Note for future developers:** If you add new protobufers you must add them here or you want be able to listen to them
# sender.rs — Outgoing Packet SenderThis file is work in progress
`send_envelope()` is the single outgoing send function. It takes a `PbEnvelope`, encodes it to bytes using prost, and sends it to the target address over UDP. A `hex_dump()` helper (currently commented out) can be re-enabled to log outgoing packet bytes for debugging. Usage pattern in any command: ```rust sender::send_envelope(&socket, "192.168.1.x:9000", envelope).await?; ``` # dummy.rs — Development Simulator The simulator generates realistic fake rover data so the UI can be developed and tested without physical hardware. It is started via the `start_dummy_streams` or `start_detection_sim` commands from `network.rs` and stopped with `stop_dummy_streams`. ### Stream table Each stream has an independent send interval and a generator function that produces time-varying data:| **Stream** | **Interval** | **Notes** |
|---|---|---|
| IMU | 20ms (50Hz) | Sinusoidal accelerometer, gyro, magnetometer |
| GPS | 200ms | Slow position drift around a fixed coordinate (52.2297°N, 6.8978°E) |
| pH | 500ms | pH value oscillating around 7.0 |
| Arm control signals | 50ms | Simulated joint control inputs |
| Arm diagnostics | 500ms | 6 motors with dummy RPM/voltage |
| Arm feedback | 100ms | Occasionally simulates an obstruction error |
| Arm positions | 50ms | All joint angles oscillating |
| Arm target | 200ms | Target XYZ + jaw state |
| Arm obstructions | 300ms | |
| Drive diagnostics | 500ms | 6 drive + 4 steering motors |
| Drive motor | 50ms | Distance to go, turning radius |
| Drive progress | 100ms | Countdown from 10m |
| Sensor board diagnostics | 500ms | Composite board health snapshot |
| Detected objects | 50ms | Generates up to 12 bounding boxes for objects |