Backend — Networking & Protocol
Location: src-tauri/src/network/
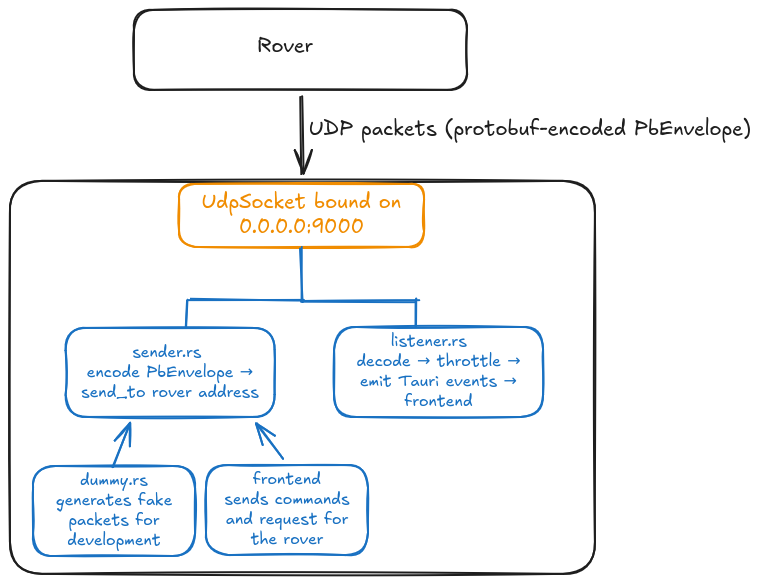
This module owns the UDP socket and all communication between the base station and the rover. It is split into four files: service, listener, sender and dummy.
- Overview
- service.rs — UDP Socket
- listener.rs — Incoming Packet Handler
- sender.rs — Outgoing Packet Sender
- dummy.rs — Development Simulator
Overview
The socket is created once in service.rs, wrapped in an Arc, and shared between the listener and the sender/dummy so they all use the same bound port.
Graph subject to change as communication gets finalized
service.rs — UDP Socket
UdpService is a thin wrapper that binds a UDP socket and holds it in an Arc<UdpSocket> so it can be shared across async tasks. It is registered as Tauri managed state at startup so any command can access the socket via State<'_, UdpService>.
- Binds to address passed from lib.rs — listens on all interfaces on the chosen port
socket()returns a clonedArcto the socket for use in other tasks
socket2 allows to customize the socket, otherwise the buffer size will be set by the system and be too small
listener.rs — Incoming Packet Handler
run_listener() is the main receive loop. It runs for the lifetime of the app as a spawned async task. On every received UDP datagram it:
- Decodes the raw bytes as a
PbEnvelopeusing prost - Extracts the inner payload variant
- Checks a per-payload throttle — events are forwarded to the frontend at most once every 100ms per payload type, regardless of how fast the rover sends
- Emits a Tauri event to the frontend with the decoded message as the payload
Throttling
Each payload type has its own independent Throttle instance. This prevents high-frequency streams (e.g. IMU at 50Hz) from flooding the frontend with more updates than it can usefully render.
Tauri events emitted
These are the event names the frontend can listen to with listen():
Note for future developers: If you add new protobufers you must add them here or you want be able to listen to them
sender.rs — Outgoing Packet Sender
This file is work in progress
send_envelope() is the single outgoing send function. It takes a PbEnvelope, encodes it to bytes using prost, and sends it to the target address over UDP. A hex_dump() helper (currently commented out) can be re-enabled to log outgoing packet bytes for debugging.
Usage pattern in any command:
sender::send_envelope(&socket, "192.168.1.x:9000", envelope).await?;dummy.rs — Development Simulator
The simulator generates realistic fake rover data so the UI can be developed and tested without physical hardware. It is started via the start_dummy_streams or start_detection_sim commands from network.rs and stopped with stop_dummy_streams.
Stream table
Each stream has an independent send interval and a generator function that produces time-varying data:
Stream | Interval | Notes |
|---|---|---|
IMU | 20ms (50Hz) | Sinusoidal accelerometer, gyro, magnetometer |
GPS | 200ms | Slow position drift around a fixed coordinate (52.2297°N, 6.8978°E) |
pH | 500ms | pH value oscillating around 7.0 |
Arm control signals | 50ms | Simulated joint control inputs |
Arm diagnostics | 500ms | 6 motors with dummy RPM/voltage |
Arm feedback | 100ms | Occasionally simulates an obstruction error |
Arm positions | 50ms | All joint angles oscillating |
Arm target | 200ms | Target XYZ + jaw state |
Arm obstructions | 300ms | |
Drive diagnostics | 500ms | 6 drive + 4 steering motors |
Drive motor | 50ms | Distance to go, turning radius |
Drive progress | 100ms | Countdown from 10m |
Sensor board diagnostics | 500ms | Composite board health snapshot |
Detected objects | 50ms | Generates up to 12 bounding boxes for objects |
Network simulation
The simulator can optionally apply jitter (random delay up to jitter_ms) and packet loss (random drop with probability packet_loss) to simulate real wireless conditions. The full simulator uses 30ms jitter and 2% packet loss; the IMU-only simulator uses no jitter or loss.